
Pishnam
Dive Into the New Age of Accelerated Analytics
Our Services
Mechanic
ادامه مطلب
ادامه مطلب
ادامه مطلب
ادامه مطلب
منوی بعد
Filament

Motors

Box
Wheel


برای پرینت بعضی از قطعات ربات مانند: بازو, دسته, باکس ها و غیره از فیلامنت PLA+ استفاده شده, علت انتخاب این فیلامنت نسبت به بقیه فیلامنت ها, پرینت سریعتر, پرینت آسانتر, انعطاف پذیری مناسب و استحکام بالا است.
صفحه اول
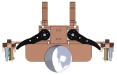
Arm
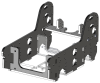
Structure
ادامه مطلب
ادامه مطلب
مجموعا ده عدد موتور در ربات استفاده شده , چهار عدد موتور XC430 برای حرکت اصلی چهار چرخ ربات و شش عدد XL330 برای حرکات ثانویه. تمامی موتور ها از مجموعه موتور های داینامیکسل(سری X) هستند که موجب ارتباط آسان است.
باکس برای قرار گرفتن مصدومین میباشد, پس از پیدا شدن مصدومین, آنها به وسیله بازو ربات گرفته شده و به باکس انتقال داده میشوند, سپس پس از پیدا شدن نقاط تخلیه, باکس با بالاآوردن خود مصدومین را به نقاط تخلیه پرتاب میکند.
چرخ ها به وسیله چهار عدد موتور XC430 حرکت میکنند, برای بدست آوردن اصطکاک زیاد روی سطوح شیبدار از لاستیک های سیلیکونی سه لایه استفاده شده است. برای پرینت چرخ ها از اینفیل بالایی استفاده شده که استحکام کافی را بدست بیاوریم.
ربات با استفاده از بازو مصدومین شناسایی شده را گرفته و به باکس ربات انتقال میدهد. چهار عدد موتور XL330 در بازو به کار گرفته شده است, دو عدد برای گریپر ها و دو عدد برای حرکت عمودی بازو به سمت باکس.
تمامی بدنه ربات از جنس پلگسی گلاس می باشند, مزیت استفاده از آن نسبت به بقیه اجناس مانند انواع فیلامنت ها برای پرینت سه بعدی, چوب و آلومینیوم. سرعت آماده سازی, استحکام و دسترسی بیشتر موجب انتخاب آن شده است.
SolidWorks

ما امسال برای طراحی بدنه ربات بخش های دیگر که مربوط به مکانیک میشوند از برنامه سالید وورکس استفاده کردیم.
سالید وورک یک برنامه طراحی سه بعدی است که معمولا برای پروژه های دانشگاه یا پروژه های پیشرفته استفاده میشود.
ادامه مطلب

pishnam@gmail.com