
Pishnam
Electronic Sensors
ادامه مطلب
ادامه مطلب
ادامه مطلب
ادامه مطلب
ادامه مطلب
منوی بعد
مجموعا از 35 جفت سنسور مادون قرمز در ربات استفاده شده است (32 جفت در برد سنسور و 3 جفت در بورد میکروسوییچ) بخش زیادی از این سنسور ها برای تشخیص و تعقیب خط ربات استفاده می شود. و تعداد کمی برای تشخیص و شناسایی مصدومین.
منوی قبل

IR Sensor
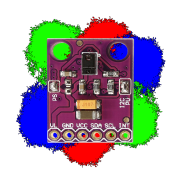
APDS-9960
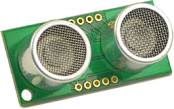
SRF05
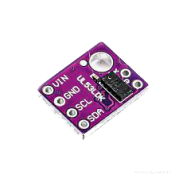
VL-530
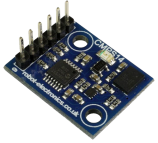
CMPS-14
از دو عدد ماژول APSD-9960 برای تشخیص رنگ های سبز در تقاطع ها و قرمز در ربات استفاده شده است. این ماژول قابلیت های دیگری بجز تشخیص رنگ مثل تشخیص فاصله و اشکال را نیز دارد, اما ما فقط از قابلیت تشخیص رنگ این ماژول استفاده می کنیم.
سه عدد ماژول اولتراسونیک Srf-05 در ربات استفاده شده است. دو اولتراسونیک جانبی برای تشخیص فاصله دیواره های منطقه تخلیه و اولتراسونیک جلو نیز برای تشخیص فاصله دیواره های منطقه تخلیه و همچنین تشخیص وجود مانع در جلوی ربات.
دو عدد ماژول VL-530 روی بازو ربات برای تشخیص فاصله سقف منطقه تخلیه در بعضی از مواقع استفاده شده است. این ماژول مانند Srf-05 فاصله را تشخیص می دهد اما با این تفاوت که امواج Srf-05 استفاده شده به صورت واید است اما VL-530 به صورت خطی.
برای تشخیص زوایا از ماژول CMPS14 استفاده شده است که با استفاده از امواج مغناطیسی تمامی زوایا را در سه جهت مختلف (X , Y و Z) با خطا یک الی دو درجه را تشخیص میدهد. این ماژول برای تشخیص شیب ها ضروری است.

pishnam@gmail.com