
Pishnam
Arm
بازو وظیفه تشخیص و گرفتن مصدومین و انتقال آنها به باکس ها را دارد, مجموعا از چهار عدد موتور XL330 در بازو استفاده شده است, دو عدد برای باز و بسته کردن گریپر ها و دو عدد برای بالا و پایین کردن بازو. درست همانند باکس ها بازو نیز برای پرینت به دو بخش تقسیم شده است.
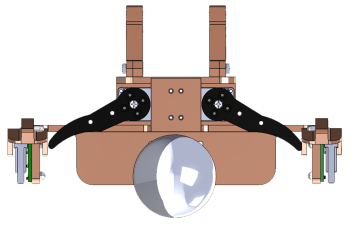
گریپر ها در حالت باز
گریپر ها در حالت بسته
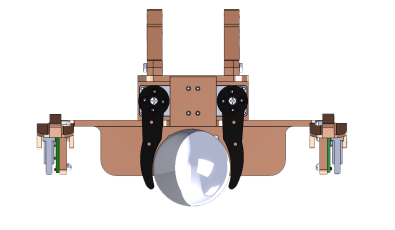
گریپر ها
همانطور که گفته شد بازو وظیفه گرفتن مصدومین را دارد که این کار به وسیله گریپر ها میسر می شود. طراحی قوسی شکل گریپر ها موجب افزایش سطح تماس با توپ ها می شود.

گریپر
بازگشت

pishnam@gmail.com