
Pishnam
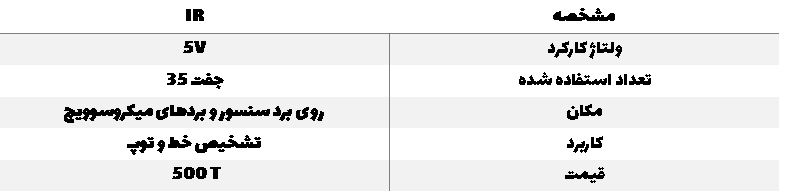
در کل در ربات ما از 35 جفت IR استفاده شده که 32 جفت آن بر روی برد سنسور است و 3 جفت آن برای بردهای میکروسوییچ اسفاده شده.
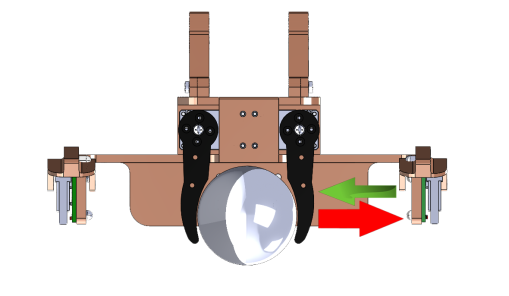
32 جفت برد سنسور برای تعقیب خط و 3 جفت برد میکروسوویچ برای تشیخیص مانه ,توپ و اینکه آیا توپ در بازو هست یا نه.
IR شامل یک گیرنده و فرستنده میشود که با مادون قرمز کار می کنند, گیرنده مشکی و فرستنده بی رنگ یا سفید است.
بازگشت
IR Sensor
توضیحات سنسور
سنسورهای مادون قرمز (Infrared یا IR) از امواج الکترومغناطیسی با طول موج بلندتر از نور مرئی استفاده میکنند. این سنسورها میتوانند برای تشخیص اشیا، اندازهگیری دما، ارتباط بیسیم و بسیاری از کاربردهای دیگر مورد استفاده قرار گیرند.
یکی از رایجترین کاربردهای سنسورهای IR در سیستمهای تعقیب خط است. در این سیستمها، حسگرهای IR نور مادون قرمز را به سطح زمین میتابانند و میزان بازتاب آن را اندازهگیری میکنند. سطوح تیره مانند خطوط سیاه نور کمتری را بازتاب میدهند، در حالی که سطوح روشن مانند زمین سفید، نور بیشتری بازتاب میکنند. این اختلاف بازتاب به ربات کمک میکند تا مسیر را تشخیص داده و دنبال کند.
علاوه بر رباتیک، سنسورهای IR در کنترلهای از راه دور، حسگرهای حرکتی و دوربینهای تصویربرداری حرارتی به کار میروند. برای مثال، کنترل تلویزیون از طریق ارسال پالسهای IR به گیرنده کار میکند. همچنین، این سنسورها در صنایع خودروسازی برای سیستمهای کمکراننده و در پزشکی برای اندازهگیری دمای بدن بدون تماس استفاده میشوند.
با توجه به دقت بالای این سنسورها، استفاده از وارنیش یا پوششهای مناسب روی آنها در رباتیک ضروری است تا تداخل نوری کاهش یابد و عملکرد سنسورها بهینه شود.
ربات ما

pishnam@gmail.com